
采用新型控制器(RC8A),*大限度發揮出電機的性能,標準循環時間提高至0.29秒。
important;">
提高精度
important;">
將手臂的狀態動態反映到控制中,可在短時間內對機械手進行減振,抑制高速搬運時的振動和殘余振動。
important;">
型號豐富
important;">
備有防塵防滴型、超凈型、吊裝型、UL規格型,在各種設置環境下均可實現自動化。
- 1. UL規格型計劃2017年推出。
-
保護等級
| 項 目 |
規 格 |
| 主體型號(2) |
HS035A1-N/* |
HS045A1-N/* |
HS055A1-N/* |
| 軸數 |
4 |
| 位置檢測方式 |
絕對編碼器 |
| 驅動電機、制動器 |
帶全軸AC伺服電機/Z軸、T軸 帶制動器 |
| 機械臂全長(第1臂 + 第2臂) |
350(125+225)mm |
450(225+225)mm |
550(325+225)mm |
| 動作角度 及 行程 |
J1(第1軸) |
±155° |
| J2(第2軸) |
±145° |
| Z(第3軸) |
*=10 :100mm, *=15 :150mm, *=20 :200mm, *=32 :320mm, |
| T(第4軸) |
±360° |
| *大可搬運質量 |
5kg |
合成*大速度
(工具安裝面中心) |
機械臂前端 |
7,200mm/sec |
6,300mm/sec |
7,100mm/sec |
| Z |
2,000mm/sec |
| T |
2,400°/sec |
| 標準循環時間(3) |
0.29sec |
重復定位精度
(工具安裝面中心)(4) |
J1+J2 |
±0.015mm |
±0.02mm |
| Z |
±0.01mm |
| T |
±0.005° |
| *大壓力輸入(向下,1秒以下) |
98N |
| *大容許慣性力矩(慣性) |
0.1kg㎡ |
| 用戶用氣動配管 |
4系統(φ4×2, φ6×2) |
| 用戶用信號線 |
19芯(近接傳感器等的信號線) |
| 空氣源 |
常用壓力 |
0.05~0.35MPa |
| *大容許壓力 |
0.59MPa |
| 空氣傳播噪音(A加權等效連續聲壓級) |
80dB以下 |
| 保護等級 |
防塵防濺型 : IP65(選項) 清潔型 : ISO等級3(選項) |
| 質量 |
約25kg |
- 1. 標準タイプ以外のバリエーション(防塵防滴クリーンタジャバラタイプ)のデータはこちらからお問い合わせください。
- 2. 型號中的“*”表示Z軸行程。
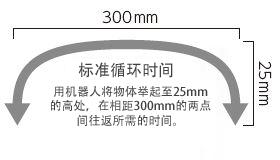
- 3. 負荷2kg時,用機器人將物體舉起至25mm的高處,在相距300mm的兩點間往返所需的時間。
- 4. 重復定位精度是周圍環境溫度恒定時的精度。
-
- ※本內容は2017年3月現在のものです。
| 項 目 |
規 格 |
| 機器人名稱 |
HS035A1-N* |
HS045A1-N* |
HS055A1-N* |
| 機械臂全長 |
125 (J1:第1臂)+225 (J2:第2臂)=350mm |
225 (J1:第1軸機械臂)+225 (J2:第2軸機械臂)=450mm |
325 (J1:第1軸機械臂)+225 (J2:第2軸機械臂)=550mm |
| 動作角度 及 行程 |
J1(第1軸) |
±155° |
| J2(第2軸) |
±145° |
| Z(第3軸)(*) |
*=10:100mm
*=15:150mm
*=20:200mm
*=32:320mm |
| T(第4軸) |
±360° |
| 軸組合 |
J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) |
| *大可搬運質量 |
5kg |
| 合成*大速度 |
機械臂前端 |
7,200mm/s |
6,300mm/s |
7,100mm/s |
| Z和T |
Z (第3軸):2,000mm/s
T (第4軸):2,400°/s |
重復定位精度
(環境溫度恒定) |
J1+J2 |
±0.015mm |
±0.02mm |
| Z |
±0.01mm |
| T |
±0.005° |
| *大壓力輸入(向下) |
98N (1秒以下) |
| *大容許慣性力矩 |
0.1kgm2(可搬質量5kg時) |
| 位置檢測方式 |
絕對編碼器 |
| 驅動電機、制動器 |
帶全軸AC伺服電機
Z軸、T軸:帶制動器 |
| 制動器解除操作 |
UL規格以外 |
- 僅在直接模式時,通過打開制動器解除開關,解除制動器
- 通過TP、MP操作解除制動器
|
| UL規格 |
- 在控制器電源ON時,通過打開制動器解除開關,解除制動器
- 不可通過TP、MP操作解除制動器
|
| 用戶用氣動配管 |
4系統 (φ4×2、φ6×2) |
| 用戶用信號線 |
19芯(近接傳感器等的信號線) |
| 空氣源 |
常用壓力 |
0.05~0.35MPa |
| *大容許壓力 |
0.59MPa |
| 防塵防濺規格的保護等級 |
IP65 |
| 凈化室規格的凈化度 (14644-1) |
清潔型:ISO等級3 (Use Point) |
| 空氣傳播噪音(A加權等效連續聲壓級) |
80dB以下 |
| 質量 |
約25kg (約55lb)(1) |
- 1. 關于各型式的值,請參照銘牌。
| 項 目 |
規 格 |
| 機器人名稱 |
|
HS045A1-S* |
HS055A1-S* |
| 機械臂全長 |
|
225(J1:第1軸機械臂)+225(J2:第2軸機械臂)=450mm |
325 (J1:第1軸機械臂)+225 (J2:第2軸機械臂)=550mm |
| 動作角度 及 行程 |
J1(第1軸) |
±152° |
±155° |
| J2(第2軸) |
±141° |
±145° |
| Z(第3軸)(*) |
*=10:100mm
*=15:150mm
*=20:200mm
*=32:320mm |
| T(第4軸) |
±360° |
| 軸組合 |
J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) |
| *大可搬運質量 |
5kg |
| 合成*大速度 |
機械臂前端 |
6,300mm/s |
7,100mm/s |
| Z和T |
Z (第3軸):2,000mm/s
T (第4軸):2,400°/s |
重復定位精度
(環境溫度恒定) |
J1+J2 |
±0.02mm |
| Z |
±0.01mm |
| T |
±0.005° |
| *大壓力輸入(向下) |
98N (1秒以下) |
| *大容許慣性力矩 |
0.1kgm2 (可搬運質量5kg時) |
| 位置檢測方式 |
絕對編碼器 |
| 制動器解除操作 |
UL規格以外 |
- 僅在直接模式時,通過打開制動器解除開關,解除制動器
- 通過TP、MP操作解除制動器
|
| 驅動電機、制動器 |
帶全軸AC伺服電機
Z軸、T軸:帶制動器 |
| 用戶用氣動配管 |
4系統 (φ4×2、φ6×2) |
| 用戶用信號線 |
19芯(近接傳感器等的信號線) |
| 空氣源 |
常用壓力 |
0.05~0.35MPa |
| *大容許壓力 |
0.59MPa |
| 防塵防濺規格的保護等級 |
IP65 |
| 空氣傳播噪音(A加權等效連續聲壓級) |
80dB以下 |
| 質量 |
約25kg (約55lb)(2) |
- 1.將懸掛規格的機器人安裝在地面后,無法進行向上作業。
- 2.關于各型式的值,請參照銘牌。


 在線客服
在線客服
 企業微信
企業微信

















